

During the middle of some Friday night MITERSing, Mike, one of this year's crop of MITERS-frosh (also one of the people responsible for the recent revival of LOLriokart), decided to build a tiny electric kart or other small silly vehicle. That night. I joined in on the project, and within 10 hours we had a rideable go kart.
At around 12:00 am Saturday we had a pile of kart-parts. There's a pair of large scooter wheels, some 1.25" square aluminum tubing, some 1" x 4" rectangular aluminum extrusion, a Kelly KBS24121 controller, an EMP 63-200 motor (essentially identical in construction but a bit smaller than the trike motor), a big Colson Performa wheel, and a very old Brooks saddle.
All the parts were scavenged from around MITERS. The motor, controller and saddle were mine, one scooter wheel came from an abandoned kick scooter, one came from Jaguar, the Colson came from the carcass of Straight Razer, and all the metal stock was scrap.

For batteries, we finished off a box of A123 18650 cells. Five of them fit side by side in the inside of the rectangular aluminum extrusion. We had enough cells for a 6S5P pack, which also happens to be the the most cells that could physically fit in the length of the extrusion.

Unfortunately, the incredibly short timespan over which this was built means my documentation is pretty poor, so there are not many intermediate construction pictures.
The back wheel and motor were both bolted to some U-channel, which was in turn bolted to the rectangular extrusion. Don't worry, the wingnuts were eventually replaced with locking nuts.
I did most of the machining of the steering assembly. I made the steering as simple as possible for quick construction, so doesn't have Ackerman steering or anything fancy like that. The steering is actually completely non-adjustable, since the tie rod is a solid square aluminum bar with holes drilled through it at the pivots. The steering column is supported by a big chunk of round Delrin which is pressed into the aluminum frame, and the column itself is 1/2" polished steel shaft. I first tried cutting it with a hacksaw, but after trashing one blade I realized it was hardened, so I milled through it with a little carbide endmill I picked up for a dollar at Swapfest.
To test the handling, we pushed it around with some clamps attached as temporary handlebars:

The steering knuckles were machined from some 1" square aluminum. At one end, they have a 1/2" hole through them, through which pass the bolts the wheels pivot around. A little thrust bearing is sandwiched between the knuckle and it's supporting plate. These bearings were found in a drawer of random bearings, and were labeled "Precision components, handle with care!". So much for that...

For a seat, we used an old Brooks saddle. It was clamped to a segment of 3" square tubing, which was fastened to the frame through the same holes as the motor and wheel bracket.

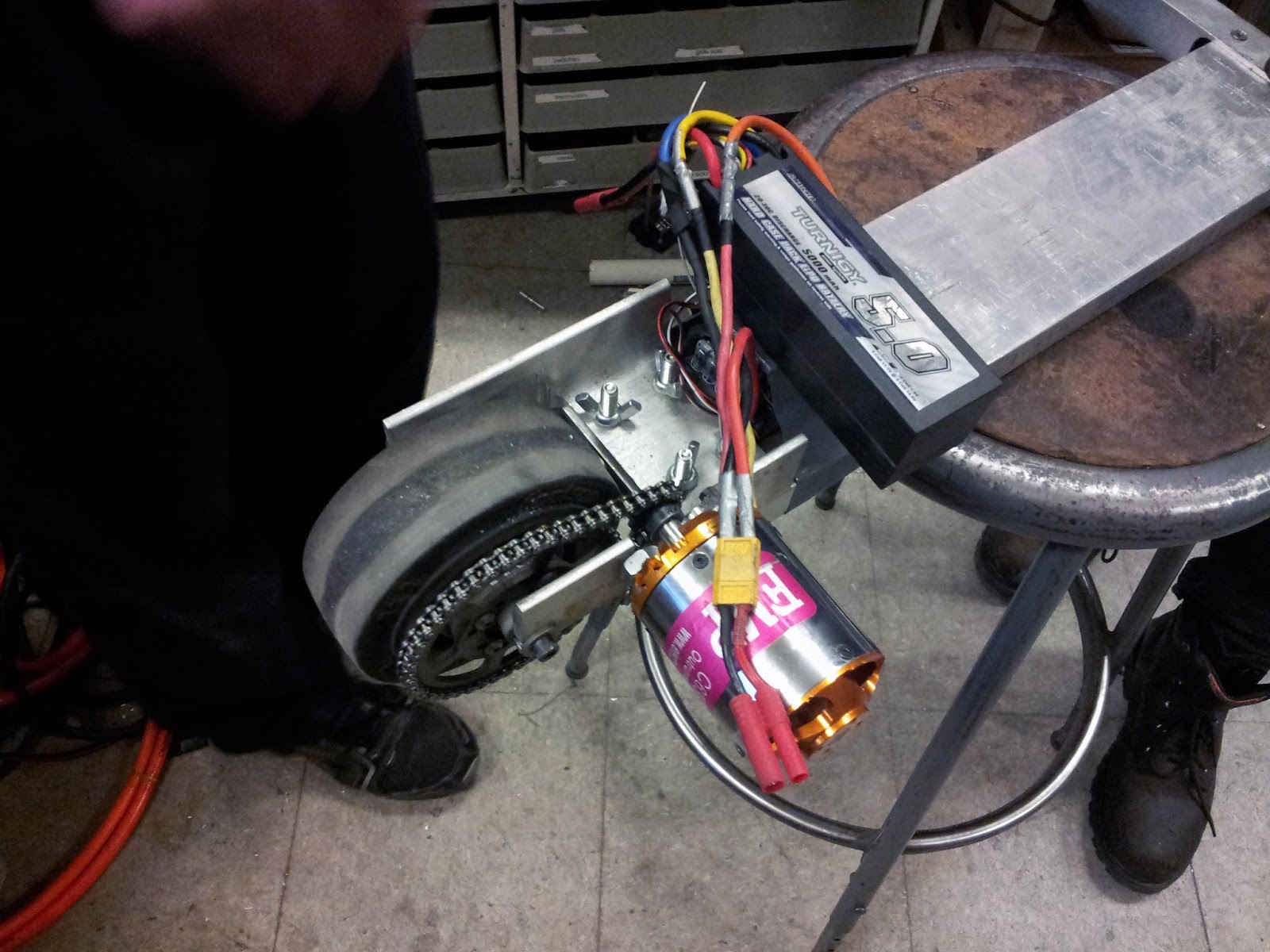
Mike quickly threw together an electronics system with some parts from his electric longboard, so we could ride it. These were a Hobbyking 120A car controller, a 4S hardcase LiPo (same as the ones in my scooter), and a really sketchy RC car remote with a broken trigger: All duct taped to the frame. As of around 9 am on Saturday morning, the kart looked like this:

We searched long and hard for something silly to use as a steering wheel, but eventually just bolted on a length of 80-20 extrusion, as a nod to all the 80-20 go karts out there.

At this point, the kart was driveable:
The electrical system was far from ideal, so it was replaced Saturday night and Sunday morning. I worked on assembling the new battery pack, while Mike got the Kelly controller ready and set up one of Charles's hall sensor boards.
I started off by gluing together sets of 5 cells in parallel. These were soldered together with a strip of copper braid across each end.

These six modules were then connected in series with more braid.

Balance connectors, power leads, and insulation and padding at the terminals was added. The big red power lead shown was actually replaced with some insulated copper braid, because the round wire took up just barely too much space for the pack to fit into the aluminum tube.

Here is the battery pack next to the frame. More insulation was added before sliding it down the tube. Actually shoving the battery in was a hair-raising procedure. To install the battery, I had to lightly lubricate the outside of the pack's insulation to prevent it from getting stuck part way down. On the first attempt, the little bulge where I spliced together balance wires got caught on the inside edge of a bolt hole, which removed a tiny speck of insulation from the balance lead of the second to last cell. There were a couple little sparks, and the frame was floating at 17V relative to the negative end of the battery. We disassembled the front end of the kart, and pushed the battery back out a few inches. The trouble spot was reinsulated, and then protected from any sharp edges with some thin plastic sheeting.

Once the kart was reassembled, we rigged up the Kelly and began playing with hall sensors and motor phases to get the motor commutating properly. First time around two of the hall sensors we used turned out to be dead, so I had to replace them. After that, everything worked great, and it only took a few minutes to get the motor spinning the right direction. Adjusting the sensor timing took a bit longer, since I had to extend the slots in the sensor board to get it positioned at the optimal spot.

The final kart: I haven't weighed it, but it probably tips the scales at 20-25 pounds. Top speed is only 15 mph, so it will be a good indoor and demo vehicle.


Now it's time to recover a weekend's worth of sleep.






